Power-law compensator design for plants with uncertainties: Experimental verification
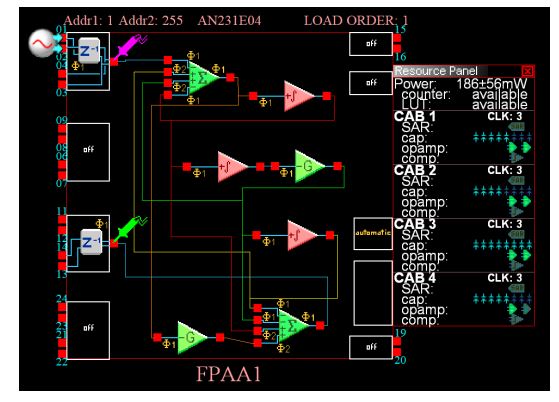
A power-law compensator scheme for achieving robust frequency compensation in control systems including plants with an uncertain pole, is introduced in this work. This is achieved through an appropriate selection of the compensator parameters, which guarantee that the Nyquist diagram of the open-loop system compensator-plant crosses a fixed point independent of the plant pole variations. The implementation of the fractional-order compensator is performed through the utilization of a curve-fitting-based technique and the derived rational integer-order transfer function is realized on a Field-Programmable Analog Array device. The experimental results confirm that the the phase margin is well preserved, even for ±40% variation in the pole location of the plant. © 2021 by the authors. Licensee MDPI, Basel, Switzerland.