
NISC library
NISC library
For researchers and students seeking to delve into the groundbreaking work of the NISC, our dedicated section offers a comprehensive repository of codes. This centralized hub provides easy access to a wide range of programming languages and tools utilized by NISC researchers. Whether you're interested in replicating experiments, exploring new applications, or simply learning from the expertise of NISC scientists, this collection serves as a valuable resource.
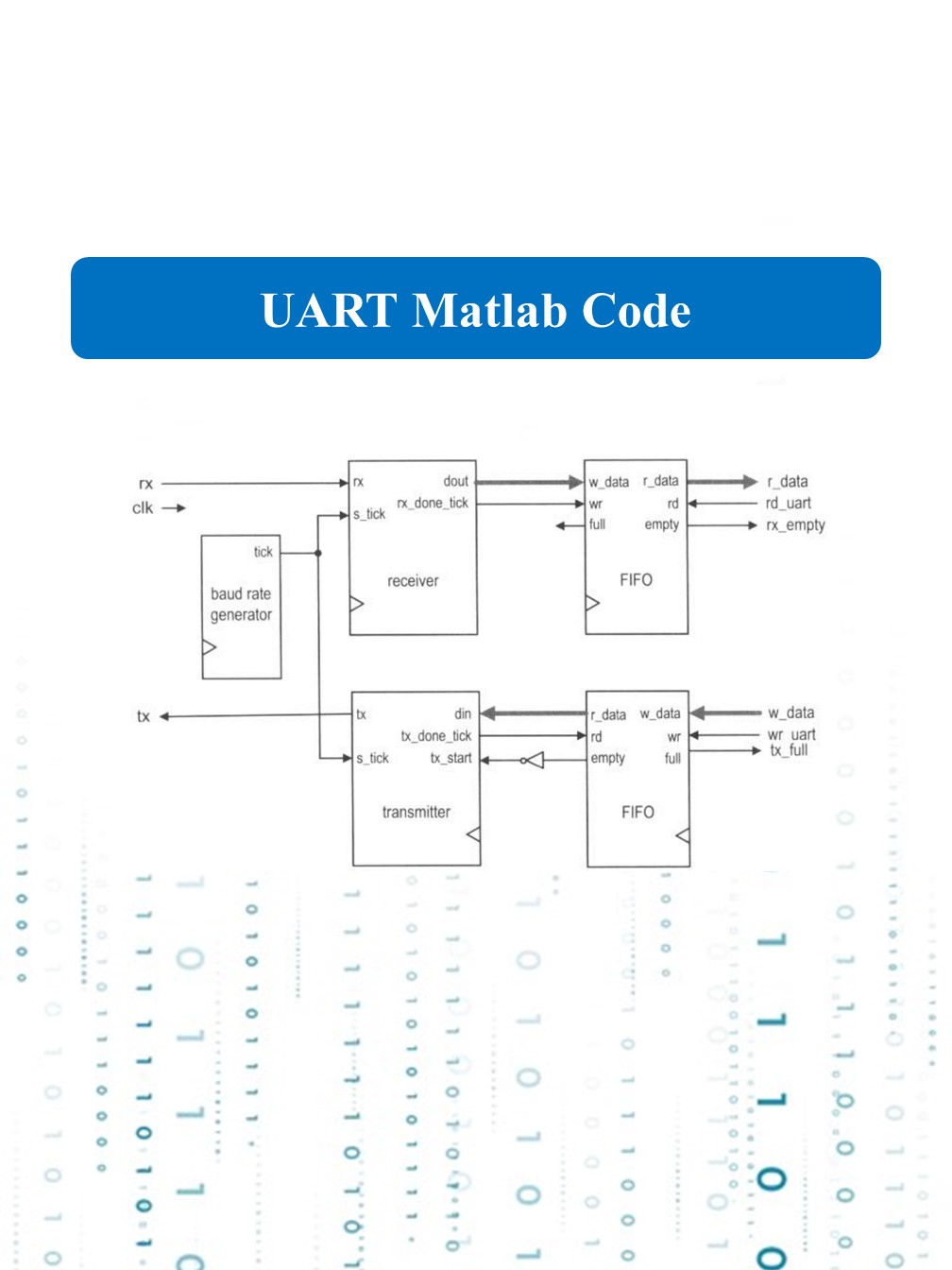
UART Code
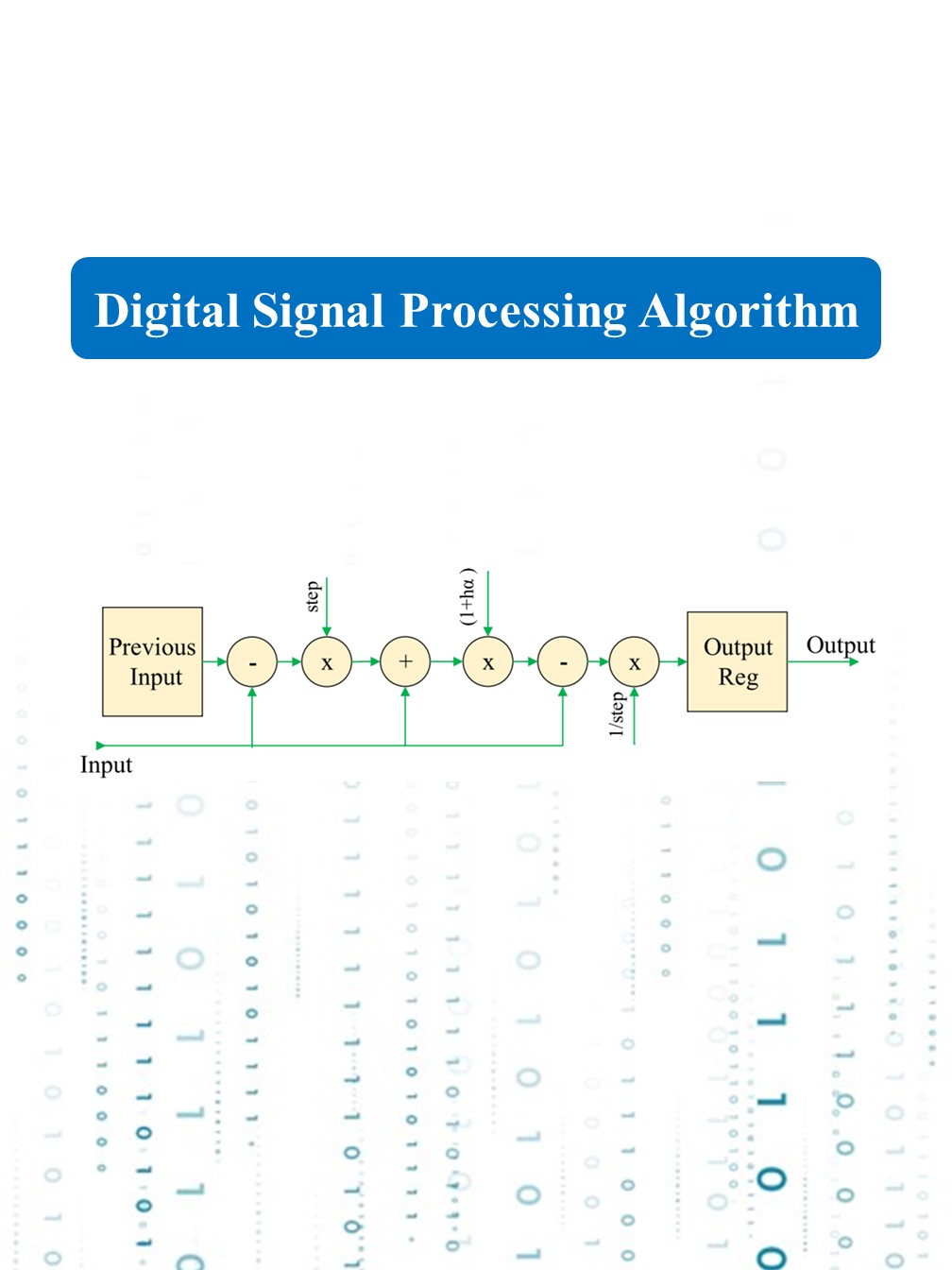
Digital Signal Processing Algorithm
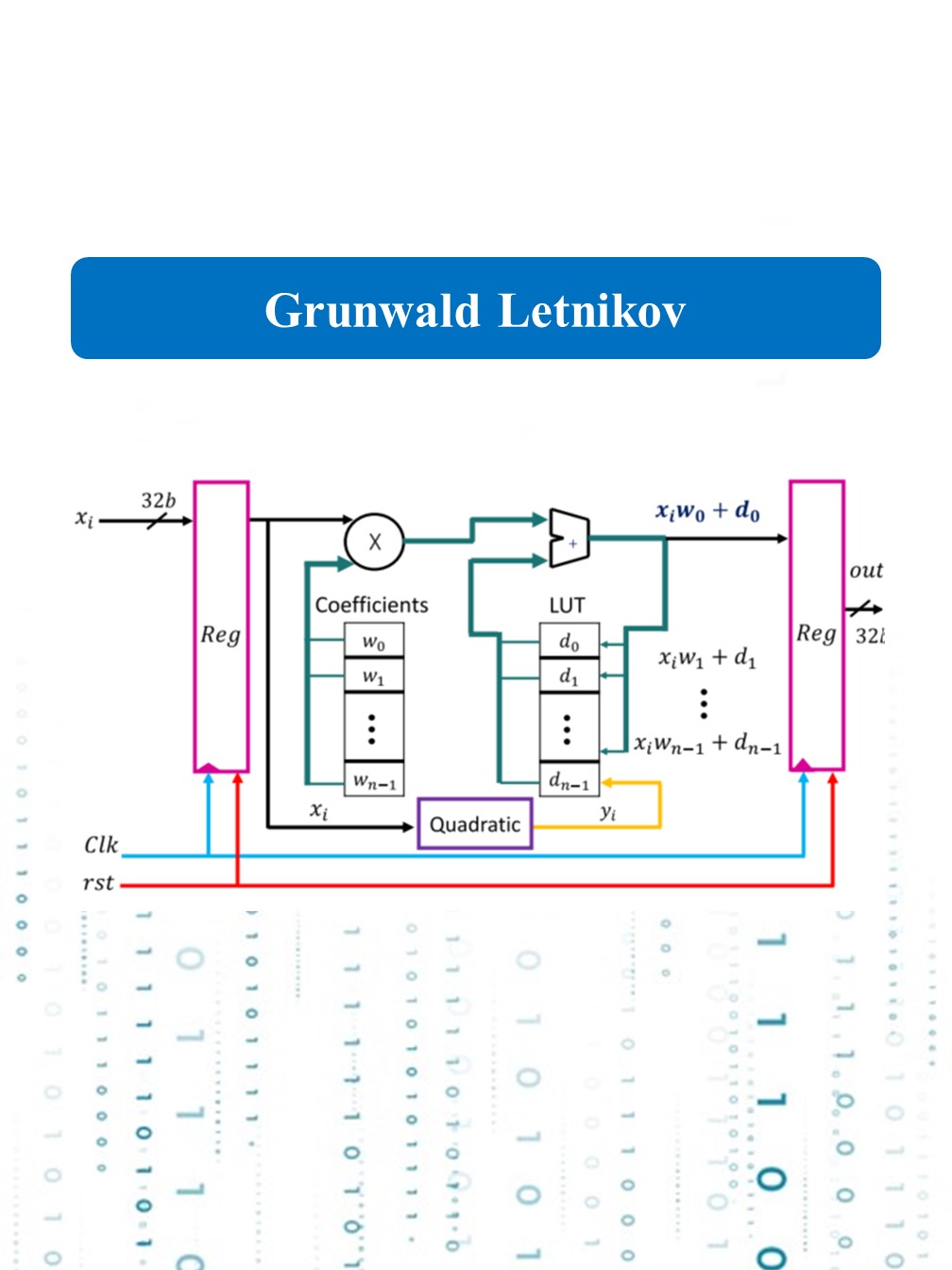
Grunwald Letnikov
Fractional Order Operators
Fractional order operators in VLSI design involve using fractional calculus to enhance signal processing and filtering capabilities. These operators are particularly useful in non-Gaussian environments where traditional filters may fail. They minimize fractional-order error measures, improving performance in noisy conditions. The fractional-order corr-entropy adaptive filter (FoCAF) is a notable example, which uses fractional calculus to adapt to complex signal distributions. Implementing these operators requires reformulating algorithms for efficient VLSI implementation. Techniques like logarithmic number systems can simplify complex operations. This approach allows for better handling of signals with non-traditional distributions. It enhances robustness and accuracy in signal processing tasks. Fractional order operators are beneficial in applications requiring high precision and adaptability. They offer a promising avenue for improving filter performance in diverse environments.
Chaotic System
Chaotic systems in VLSI design impact the unpredictable behavior of chaotic dynamics to enhance data processing speed and efficiency. These systems are sensitive to initial conditions and can explore vast solution spaces rapidly, making them ideal for optimization tasks. Chaotic oscillators can generate pseudo-random numbers efficiently, enhancing data security and processing speed. They are used in applications like cryptography and secure communications. Chaotic systems can process data in parallel, boosting processing speeds. Their integration into ASIC designs offers advantages in speed, robustness, and energy efficiency. This approach has potential applications in signal processing, communications, and AI. Chaotic systems provide innovative solutions for ultra-high-speed data processing tasks. They offer significant improvements over traditional methods in terms of performance and energy consumption.
Hardware Accelerator
Hardware accelerators in VLSI design are specialized circuits designed to speed up specific computational tasks. They are particularly useful in applications requiring high performance, such as data routing and processing. By offloading computationally intensive tasks from general-purpose processors, hardware accelerators can significantly improve system efficiency. They are often implemented using FPGAs or ASICs, allowing for customization and reconfigurability. This approach enables faster execution of algorithms like Lee's routing algorithm. Hardware accelerators achieve speedups by executing tasks in parallel or reducing computational complexity. They are crucial in applications where real-time processing is essential. By enhancing performance and reducing power consumption, hardware accelerators play a vital role in modern computing systems.
Memristors
Memristors, or memory resistors, are emerging devices that combine memory and resistance properties. They offer non-volatile memory, low power consumption, and high integration density, making them ideal for applications like neuromorphic computing and analog signal processing. Memristors can mimic biological synapses, enabling efficient artificial neural networks for tasks like pattern recognition and machine learning. Their programmable resistance allows for precise control over electric current, making them suitable for analog and digital circuits. Memristors have the potential to revolutionize memory storage and AI by providing faster, more energy-efficient solutions. They are scalable and compatible with existing fabrication processes, facilitating industry adoption. Ongoing research focuses on optimizing memristor technology for practical applications.
Full Custom Designs
Full custom designs in VLSI involve creating integrated circuits from scratch, tailoring every aspect to meet specific performance requirements. This approach allows for maximum optimization of area, speed, and power consumption. Full custom designs are typically used for high-performance applications where off-the-shelf solutions are insufficient. They require extensive expertise and resources, as every transistor and wire is manually placed and routed. The design process involves detailed simulation and verification to ensure functionality and performance. Full custom designs are critical in applications like high-speed processors and specialized ASICs. They offer the best possible performance but are time-consuming and costly to develop. Despite these challenges, they remain essential for cutting-edge technology development.